Advanced configuration management
Policy generation
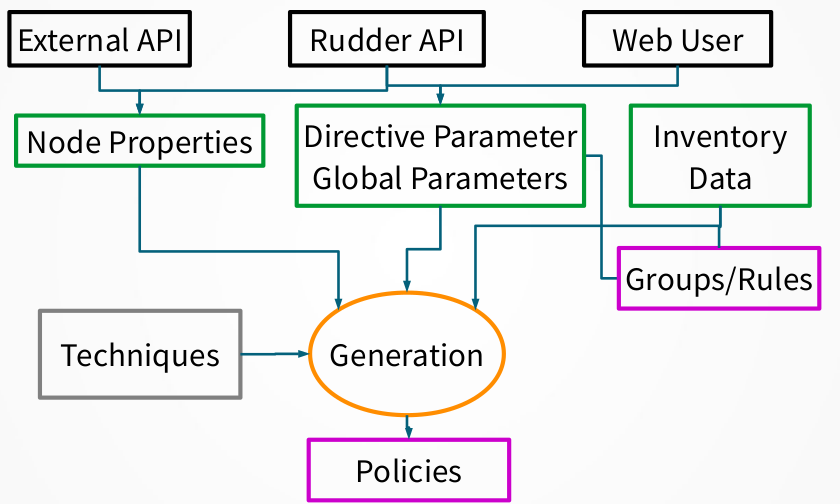
Each time a change occurs in the Rudder interface, having an impact on the policy needed by a node, it is necessary to regenerate the modified policies for every impacted node. By default this process is launched after each change.
The process of policy generation:
-
Use configured policies and information about the nodes to generate the files defining the policy that reflects the desired state
-
Compute and store expected reports that will be produced when executing these policies
-
Check the validity of the generated policies
-
Replace the old version of the policies by the new one for impacted node
-
Restart the policy server on the Rudder central server is authorizations have changed
You can customize some of these actions and add new ones using the Server Event Hooks.
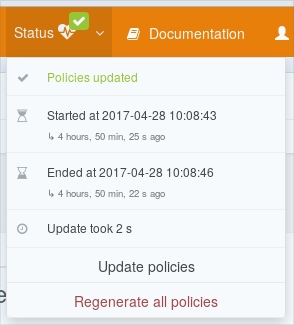
Update policies button
The button Update policies on the top right of the screen, in the Status menu, allows you to force the regeneration of the policies. As changes in the inventory of the nodes are not automatically taken into account by Rudder, this feature can be useful after some changes impacting the inventory information.
Regenerate all policies button
The button Regenerate all policies on the top right of the screen, in the Status menu, allows you to force the regeneration of all policies. It will clear all internal caches, and force a complete computation of the policies. This is generally useful to make sure everything is correct after a problem on the central server.
Policy generation info log
Policy generation is a complex process and it is central to Rudder use. You will often want to know more about a policy generation result: what was the reason for a failure? What nodes where upated? Or even more specifics info like: where are info and debug log?
/var/rudder/policy-generation-info
Directory /var/rudder/policy-generation-info contains information about the last policy generation(s)
in the following files:
-
last-failure-message: when a generation fails, failure message is stored here. It is helpful for debugging purpose (for example when message is very long), or to know what happened in case of transient errors. -
last-updated-nodeids: this file contains list of node updated in last generation. It is in a source-able format which defined three bash array: -
RUDDER_UPDATED_POLICY_SERVER_IDS: contains the set of updated policy servers (root or relay) -
RUDDER_UPDATED_NODE_IDS: contains the set of updated standard nodes -
RUDDER_NODE_IDS: contains both updated policy server and nodes. Policy servers always come first.
Each file starts with a comment describing what policy generation generated it.
Two version of each of these files is concerved: the oldest one has a .old suffix.
webapp logs
Rudder web application logs located in /var/log/rudder/webapp/yyyy_MM_dd.stderrout.log contains information
about policy generation process. In rudder 6.0, all policy generation logs are gathered under policy.generation
namespace (with optionally more precise namespace, like policy.generation.timing for timing information, or
policy.generation.update for updated nodes, etc).
By default, policy generation logs when it starts with generic information about system:
[2020-03-12 15:32:28+0100] INFO policy.generation - Start policy generation, checking updated rules [2020-03-12 15:32:29+0100] INFO policy.generation - [metrics] Xmx:1.55 GB nodes:8 (cached:0) rules:248 (enabled:35) techniques:131 (enabled:127) directives:238 (enabled:224) groups:26 (dynamic:17) parameters:3
How many nodes were updated:
[2020-03-12 15:32:39+0100] INFO policy.generation - Configuration of 8 nodes were updated, their policies are going to be written
Timing information about generation steps (they are always logged to allows to check general performance evolution):
[2020-03-12 15:33:37+0100] INFO policy.generation.timing - Timing summary: [2020-03-12 15:33:37+0100] INFO policy.generation.timing - Run pre-gen scripts hooks : 200 ms [2020-03-12 15:33:37+0100] INFO policy.generation.timing - Run pre-gen modules hooks : 19 ms [2020-03-12 15:33:37+0100] INFO policy.generation.timing - Fetch all information : 325 ms [2020-03-12 15:33:37+0100] INFO policy.generation.timing - Historize names : 7004 ms [2020-03-12 15:33:37+0100] INFO policy.generation.timing - Build current rule values : 327 ms [2020-03-12 15:33:37+0100] INFO policy.generation.timing - Build target configuration : 2277 ms [2020-03-12 15:33:37+0100] INFO policy.generation.timing - Write node configurations : 57132 ms [2020-03-12 15:33:37+0100] INFO policy.generation.timing - Save expected reports : 80 ms [2020-03-12 15:33:37+0100] INFO policy.generation.timing - Run post generation hooks : 411 ms [2020-03-12 15:33:37+0100] INFO policy.generation.timing - Number of nodes updated : 8 [2020-03-12 15:33:37+0100] INFO policy.generation.timing - Policy generation succeeded in: 1 min 9 s
End finally summary of generation: success or failure, total time:
[2020-03-12 15:33:37+0100] INFO policy.generation - Successful policy update '10198' [started 2020-03-12 15:32:28 - ended 2020-03-12 15:33:37]
Much more information can be logged about policy generation (hook execution and timing, much more precise timing,
updated nodes, files written, etc). All corresponding logs and verbosity levels are documented and controlled
in /opt/rudder/etc/logback.xml.
Understanding how Technique Editor works
In this chapter, we are giving an overview about how the Technique Editor works and how it is integrated with the main Rudder application.
Directory layout
As explained in http://www.ncf.io/, ncf uses a structured directory tree composed of several layers of logic, from internal libraries to Techniques and user services. All the files and logic in these folders will be named "library" for simplicity
ncf directory structure exists in two root folders:
-
/usr/share/ncf/tree-
This is the standard library installation folder. It is created and updated by the the ncf package. This folder will be completely overwritten when you update ncf package so you should never modify anything here: it will be lost at some point.
-
-
/var/rudder/configuration-repository/ncf-
This is were you add your own ncf Generic Methods and Techniques. Techniques created with the Technique Editor will be located here, and both Generic and Techniques in that place will be accessible in the Technique Editor alongside what is provided by the standard library.
-
Sharing ncf code with nodes
To share those folders to all nodes, Rudder makes a copy of these folders in two places:
-
/var/rudder/ncf, for part common to all nodes - so NOT techniques,-
/var/rudder/ncf/localis a copy of node-independent directories from/var/rudder/configuration-repository/ncf, so almost everything BUT/var/rudder/configuration-repository/ncf/50_techniques. -
/var/rudder/ncf/commonis a copy/usr/share/ncf/tree
-
-
/var/rudder/share/xxxx-yyyy-node-id-zzzz/rules/cfengine-community/Technique_Name/1.0/Technique_Name.cffor techniques, with one directory for each technique applied to the node. -
/var/rudder/share/xxxx-yyyy-node-id-zzzz/rules/cfengine-community/rudder_expected_reports.csvcontains information about report expected for all ncf techniques applied to that node.
Files in /var/rudder/ncf are synchronized automatically by the "rudder agent update"
command when the agent runs on the server. So any modification done in files
in these directories will be lost at the next synchronization.
Files under /var/rudder/share/ are updated during policy generation.
A node updates its ncf local library by copying the content of these two folders during its policy update phase.
From ncf Technique Editor to Rudder Techniques and back
Here we will explain how the Technique Editor integration to Rudder is done to transform ncf techniques into full fledged Rudder one. We will also get the big picture of the web flow and the resulting events triggered on Rudder server side.
Each action in the Technique Editor interface produces requests to an API defined over ncf.
All of the requests are authenticated thanks to a token passed in the JSESSIONID header. The token is generated when an authenticated user is connected to the Rudder interface (typically thanks to his browser).
That token is shared to the Technique Editor interface, which itself passes the JSESSIONID header to all requests.
If you have authentication issue, check that your Rudder session is not expired.
- Get request
-
Get request will get all Techniques and Generic Methods in a path passed as parameters of the request in the "path" javascript variable:
Get requests are triggered when accessing Technique editor.
The ncf API will parse all files in the parameter path by running "cf-promises -pjson" on all Techniques, checking that all Techniques are correctly formed.
The ncf API will also look to all Generic Methods description data to build the catalog of available Generic Methods.
The resulting information are sent back to the Technique Editor for displaying.
- Post requests
-
Post requests are issued when a Technique is created, modified or deleted. They will only work on Techniques available in the path given in parameter.
They are triggered when clicking on save/delete button.
The main difference with get requests is that hooks are launched before and after the action is made.
We will see all hooks behavior in the following dedicated hooks section.
Hooks
On each POST request, pre- and post- hooks are executed by the Technique Editor. These hooks are used for the Rudder integration to help transform pure ncf Techniques into Rudder one.
-
pre-hooks are located in:
/var/rudder/configuration-repository/ncf/pre-hooks.d -
post-hooks are located in:
/var/rudder/configuration-repository/ncf/post-hooks.d
As of March 2015, we have two post-hooks defined and no pre-hooks:
-
post.write_technique.commit.sh-
It commits the Technique newly created into Rudder Git configuration repository located in
/var/rudder/configuration-repository.
-
-
post.write_technique.rudderify.sh-
It generates a valid Rudder Technique from a the newly created Technique and reloads Rudder Technique Library so that updates are taken into account.
-
If you want to run post hooks by hand, you can use the following command:
/var/rudder/configuration-repository/ncf/post-hooks.d/post.write_technique.commit.sh /var/rudder/configuration-repository bundle_name
Server Event Hooks
Rudder 4.1 introduces the possibility to execute files (hooks), typically scripts, when some predefined event occurs on Rudder.
Generalities about hooks
Hooks are organized in subdirectories. The root of the sub-directories is /opt/rudder/etc/hooks.d/
Each sub-directory has a name related to the event that will trigger the hooks execution. By default, a hook directory contains a template example and a Readme.txt file explaining the generalities about hooks and the specificities of that hook (parameters, etc).
Hooks must be executable. All executable files will be used as hooks EXCEPT if they end with one of the extensions listed in /opt/rudder/etc/rudder-web.properties for property *rudder.hooks.ignore-suffixes. A common convention is to use the .disabled suffixe to do so.
Non executable files will be ignored (which allows to put other files in these directories, like a readme, for example).
Hooks parameter are passed by environment variable. Rudder will fill dedicated environment variable for each hook.
Hooks are executed sequentially, in lexical order. We encourage you to use the patter "NN-hookname", with NN a number like "05", "20", etc.
Hooks have normalized returned code. Return codes on hooks are interpreted as follow:
-
0 : success, no log (appart if debug one) , continue to next hook
-
1-31 : error , error log in /var/log/rudder/webapp/, stop processing
-
32-63 : warning, warning log in /var/log/rudder/webapp/, continue to next hook
-
64-255 : reserved for future use case. Behavior may change without notice.
Hooks have a maximum execution time allowed. After some time (2s for policy generation node specific events, 30s for other cases) a warning will be issued. After a longer time (20s for policy generation node specific events, 5 min for other cases), the hook will be killed. You can change these timeouts with the following directives, that must be in the 1000 first characters of your hook script, prefixed by any type of comments characters (only the end of line is considered):
-
HOOK_WARN_TIMEOUT = <length><unit>
-
HOOK_KILL_TIMEOUT = <length><unit>
Where length is an integer, and unit is one of micro(s), ms, millisecond(s), s,
second(s), m, minute(s), h, hour(s).
Available Hooked events: for now, all hooks are related to different steps of the policy generation process or node lifecycle and inventory reception. In the future, more cases will be supported.
node-post-acceptance
When/What ?
This directory contains hooks executed after an inventory was received for an already accepted node and the node information were successfully updated.
Typically, these hooks triggers action on other systems, like updating info on an external CMDB, or send notification.
Parameters
Hooks parameters are passed by environment variable:
-
RUDDER_NODE_ID: the nodeId
-
RUDDER_NODE_HOSTNAME: the node fully qualified hostname
-
RUDDER_NODE_POLICY_SERVER_ID: the node policy server id
-
RUDDER_NODE_OS_NAME: OS normalized name (Linux distribution, Windows with version, etc)
-
RUDDER_NODE_OS_VERSION: OS version
-
RUDDER_NODE_OS_SP: OS service pach
-
RUDDER_NODE_OS_STRING: OS long string name
-
RUDDER_NODE_IPS: space separated list of IPs of that node
-
RUDDER_AGENT_TYPE: agent type ("cfengine-community" or "dsc")
node-post-acceptance
node-post-acceptance
When/What ?
This directory contains hooks executed after an inventory was successfully processed for a node in pending state (never seen, or already pending).
Typically, these hooks triggers action on other system, like registering the node into a monitoring system or into an external CMDB, or to send notification.
Parameters
Hooks parameters are passed by environment variable:
-
RUDDER_NODE_ID: the nodeId
-
RUDDER_NODE_HOSTNAME: the node fully qualified hostname
-
RUDDER_NODE_POLICY_SERVER_ID: the node policy server id
-
RUDDER_NODE_OS_NAME: OS normalized name (Linux distribution, Windows with version, etc)
-
RUDDER_NODE_OS_VERSION: OS version
-
RUDDER_NODE_OS_SP: OS service patch
-
RUDDER_NODE_OS_STRING: OS long string name
-
RUDDER_NODE_IPS: space separated list of IPs of that node
-
RUDDER_AGENT_TYPE: agent type ("cfengine-community" or "dsc")
node-post-acceptance
node-post-deletion
When/What ?
This directory contains hooks executed after a node was successfully deleted.
Typically, these hooks clean resources related to that node and notify external services that the node was deleted from Rudder.
Parameters
Hooks parameters are passed by environment variable:
-
RUDDER_NODE_ID: the nodeId
-
RUDDER_NODE_HOSTNAME: the node fully qualified hostname
-
RUDDER_NODE_POLICY_SERVER_ID: the node policy server id
-
RUDDER_AGENT_TYPE : agent type ("cfengine-community" or "dsc")
-
RUDDER_POLICIES_DIRECTORY_CURRENT: the full path of the base directory containing policies for that node
-
RUDDER_POLICIES_DIRECTORY_NEW: the full path of the base directory containing next policies for that node (during a generation)
-
RUDDER_POLICIES_DIRECTORY_ARCHIVE: the full path of the base directory containing previous policies for that node
-
RUDDER_NODE_ROLES: a comma separated list of node’s server role name
node-pre-deletion
When/What ?
This directory contains hooks executed before a node is deleted.
Typically, these hooks interact with external services using knowledge to validate if the node should actually be deleted.
Parameters
Hooks parameters are passed by environment variable:
-
RUDDER_NODE_ID: the nodeId
-
RUDDER_NODE_HOSTNAME: the node fully qualified hostname
-
RUDDER_NODE_POLICY_SERVER_ID: the node policy server id
-
RUDDER_AGENT_TYPE : agent type ("cfengine-community" or "dsc")
-
RUDDER_POLICIES_DIRECTORY_CURRENT: the full path of the base directory containing policies for that node
-
RUDDER_POLICIES_DIRECTORY_NEW: the full path of the base directory containing next policies for that node (during a generation)
-
RUDDER_POLICIES_DIRECTORY_ARCHIVE: the full path of the base directory containing previous policies for that node
-
RUDDER_NODE_ROLES: a comma separated list of node’s server role name
policy-generation-failed
Parameters
Hooks parameters are passed by environment variable:
-
RUDDER_GENERATION_DATETIME : ISO-8601 YYYY-MM-ddTHH:mm:ss.sssZ date/time that identifies that policy generation.
-
RUDDER_END_GENERATION_DATETIME : ISO-8601 YYYY-MM-ddTHH:mm:ss.sssZ date/time when the generation ended (minus these hooks)
-
RUDDER_ERROR_MESSAGE_PATH : path to a file which contains the full error message of the policy generation failure.
policy-generation-finished
When/What ?
This directory contains hooks executed after policies are fully generated for all nodes, and these new policies are available for download for the node.
Typically, these hooks are used to log information about the generation which just happened or notify third parties that new policies are available (for ex: cf-serverd SIGHUP)
Parameters
Hooks parameters are passed by environment variable:
-
RUDDER_GENERATION_DATETIME : ISO-8601 YYYY-MM-ddTHH:mm:ss.sssZ date/time that identifies that policy generation.
-
RUDDER_NODE_IDS_PATH : path to a sourcable file with variable RUDDER_NODE_IDS containing a bash array of node id updated during the process, or the empty array if no nodes were updated.
-
RUDDER_END_GENERATION_DATETIME : ISO-8601 YYYY-MM-ddTHH:mm:ss.sssZ date/time when the generation ended (minus these hooks)
-
RUDDER_NUMBER_NODES_UPDATED : integer >= 0; number of nodes updated (could be found by counting $RUDDER_NODE_IDS)
-
RUDDER_ROOT_POLICY_SERVER_UPDATED: 0 if root was updated, anything else if not
policy-generation-node-finished
When/What ?
This directory contains hooks executed after policies are fully generated for node and made available for the node to download.
Typically, these hooks interact with external services using knowledge from the generated policies (ex: send node-properties JSON file to a third party service).
Parameters
Hooks parameters are passed by environment variable:
-
RUDDER_GENERATION_DATETIME : generation datetime: ISO-8601 YYYY-MM-ddTHH:mm:ss.sssZ date/time that identify that policy generation start
-
RUDDER_NODE_ID : the nodeId
-
RUDDER_NODE_HOSTNAME : the node fully qualified hostname
-
RUDDER_NODE_POLICY_SERVER_ID : the node policy server id
-
RUDDER_AGENT_TYPE : agent type ("cfengine-community" or "dsc")
-
RUDDER_POLICIES_DIRECTORY_CURRENT : new policies directory (for ex for nodes under root: /var/rudder/share/$RUDDER_NODE_ID/rules)
Technically, you could infer RUDDER_POLICIES_DIRECTORY_NEW, from RUDDER_NODE_ID, but it’s tedious for nodes behind a relay, and it is just simpler not to have to track what are the Rudder internal names, which may change without notice.
policy-generation-node-ready
When/What ?
This directory contains hooks executed after policies are fully generated for node, but before these new policies replace the old ones (technically, before we move /var/rudder/share/$NODEID/rules.new to /var/rudder/share/$NODEID/rules).
Typically, these hooks proceed to sanity checks on the new policies (ex: cf-promises), update permission on files, or interact with external services using information from the generated policies (ex: send node-properties JSON file to a third party service).
Parameters
Hooks parameters are passed by environment variable:
-
RUDDER_GENERATION_DATETIME : generation datetime: ISO-8601 YYYY-MM-ddTHH:mm:ss.sssZ date/time that identify that policy generation start
-
RUDDER_NODE_ID : the nodeId
-
RUDDER_NODE_HOSTNAME : the node fully qualified hostname
-
RUDDER_NODE_POLICY_SERVER_ID : the node policy server id
-
RUDDER_AGENT_TYPE : agent type ("cfengine-community" or "dsc")
-
RUDDER_POLICIES_DIRECTORY_NEW: new policies directory (for ex for nodes under root: /var/rudder/share/$RUDDER_NODE_ID/rules.new)
Technically, you could infer RUDDER_POLICIES_DIRECTORY_NEW, from RUDDER_NODE_ID, but it’s tedious for nodes behind a relay, and it is just simpler not to have to track what are the Rudder internal names, which may change without notice.
New directives default naming scheme
When a new directive is created, by default the 'Name' field is filled with the Technique name. For example, if you create a new Directive from the 'Users' Technique, the Name field will get the value: "Users".
This not always what you want, especially for your custom Techniques. So you have the possibility to define new default values for Name, at Technique or at Technique and Version granularity.
This is done by adding or updating the file:
/var/rudder/configuration-repository/techniques/default-directive-names.conf.
That file need to be committed in git, and the Technique library reloaded to take effect:
cd /var/rudder/configuration-repository/techniques/ vi default-directive-names.conf .... git add default-directive-names.conf git commit -m "Change default names for new directives" rudder server reload-techniques
The file format is a simple techniqueId[/optionalVersion]: default name to use format.
The Technique ID is the name of the directory containing the Technique version directory
in /var/rudder/configuration-repository/techniques.
For example, if we imagine that in your company, you have the internal convention to create one directive by user role with the login in the name, you would prefer to have a default value to:
Role <user-role>: <matching-login>
And then, for Users Technique version 7, you changed your mind and now use the scheme:
Role: [user-role] (with login [login])
Then the file will look like:
# Default pattern for new directive from "userManagement" technique: userManagement= Role <user-role>: <matching-login> # For userManagement version 2.0, prefer that pattern in new Directives: userManagement/7.0: Role: [user-role] (with login [login])
Policies ordering
Configuration in Rudder is based on desired states, describing the expected state of the system, and not an ordered list of actions to run. However, there are cases where having order is desirable (like ensuring that a JVM is present before deploying an Application server, or ensuring a user is present before setting it sudoers), even if it will converge over the course of several agent runs.
Rudder sorts the policies following this (best-effort) principle:
-
Methods in a technique are executed in the order they appear in the interface
-
Rules are executed in alphanumeric order
-
Inside of a rule, directives are executed in alphanumeric order, except for:
-
Mono-instance techniques: only one directive is selected and others are discarded (and they will be tagged as such in node detail compliance)
-
the directive with the highest priority will be selected
-
in case of equal priorities, the rule name and then the directive name are used for sorting them (in alphanumeric order)
-
-
Limited multi-instance techniques: all directives will be merged into one policy on the node
-
the merge order is based on priority, then rule name, and then directive name
-
the place of the merged policy itself in the global policies will be based on the rule and directive names of its most prioritary source directive
-
-
| The type of a technique is visible when clicking on the technique itself in the directives page. |
|
Best practice
You should always start Rules and Directives name by 2 (or 3) digits to be able to easily reorder Policy evaluation if the need happen: Do not use: "My general security rule" and "Check ssh configuration" But use: "05. My general security rule" and "40. Check ssh configuration" |
Advanced example
-
given three Techniques A, B and C
-
directives A1 and A2 based on Technique A, directives B1 and B2 based on B, directives C1 and C2 based on C
-
all Directives have the same priority,
-
rule R0 having [C1], R1 having [A1, B2] and rule R2 having [A2, B1, C2], all applied on a same node,
-
merging (R0, C1) and (R2, C2) ⇒ [C1, C2] and keep (R0, C1) as Policy order
-
merging (R1, A1) and (R2, A2) ⇒ [A1, A2] and keep (R1, A1) as Policy order,
-
merging (R1, B2) and (R2, B1) ⇒ [B2, B1] (because R1 < R2) and keep (R1, B2) for policy order,
-
so policies are sort: (R0, C1) then (R1, A1) then (R1, B2)
-
resulting ordering of directive’s values will be: [C1, C2] then [A1, A2] then [B1, B2]
Share files between nodes
Rudder 4.1 introduced a way to share files from one node to another. It allows a node to send a file to its relay, which will make it available for another target node, that has to to specifically download it.
This file sharing method is secured by:
-
The control of uploaded file signature by the server, to check it matches the source node’s private key.
-
The same mechanism as standard file copy in Rudder to download the shared file from the server.
It also includes a ttl mechanism that allows sharing a file for a limited amount of time.
To use this feature, two generic methods are available in the technique editor:
-
sharedfile_from_node: To download a file shared from another node.
-
sharedfile_to_node: To make a file available to another node.
See the documentation of these methods for details about the required parameters, and especially sharedfile_to_node for a complete usage example.
Update technique resources from command line
Since Rudder 6.2 techniques can have resource files that are automatically deployed to each node applying these techniques.
Technique resources can be modified via the technique editor interface.
It can however be useful to update a technique resource from outside the interface, for example to update it after an external change.
To do this, on your Rudder server, edit the technique resource file(s) located in
/var/rudder/configuration-repository/techniques/<technique category>/<technique name>/<technique version>/resource
Then add them to git and reload the technique:
cd /var/rudder/configuration-repository/techniques/<technique category>/<technique name>/<technique version>/ git add resource git commit -m"My technique resource updated" rudder server reload-techniques
You’re done.
← Variables REST API →